

RISE
- Status
- Introduction
- Specifications
- Filter
- Photometric Standards
- Sensitivity, Saturation & Defocus
- Timing Accuracy & Precision
- Dates of Hardware Changes
- Data Pipeline
- Phase 1 Information
- Phase 2 Information
Status
ONLINE
Introduction
RISE is a fast-readout camera developed in collaboration with the Queens University Belfast for the precision measurement of transiting exoplanet timing. The camera optics were designed by John Meaburn. Mechanical design work was done at Liverpool JMU, and mechanical and software build done at QUB.
The CCD camera in use with RISE is an Andor DW485 which houses an E2V CCD 47-20 frame transfer device.
Specifications
- Single fixed filter
- 1024x1024 pixels in imaging field
- Pixel Scale: 0.54 arcsec/pixel (unbinned)
- Field of view 9.2 x 9.2 arcmin (11 arcmin unvignetted circle — see diagram below)
- Minimum exposure Time 1.2 seconds (1x1 binning)
- Minimum exposure Time 0.6 seconds (2x2 binning) [see also Timing]
- Little readout overhead (0.035sec)
- Gain (1x1 or 2x2 binning) 2.4 electrons/count
- Read noise (1x1 or 2x2 binning) 12 electrons
- Mean dark current (2x2 binning) 0.0143 counts/sec
- Saturation Limit (1x1 binning) 20,000 counts
- Saturation limit (2x2 binning) 40,000 counts
 |
Sketch of the RISE unvignetted field-of-view (the circle) superimposed onto the square CCD field. |
Filter

Click for bigger version
RISE uses a single fixed "V+R" filter made from combined 3mm OG515 + 2mm KG3 filters. A calculated transmission curve for the RISE system with this filter is shown at right.
This V+R filter was installed on 13th January 2020. RISE also used this filter from its original installation in 2008 up to 25th July 2017.
Between July 2017 and January 2020, RISE used a 720nm longpass filter, which could be thought of as approximately "I+Z".
Photometric Standards
As the majority of RISE data are taken for the purpose of relative photometry using secondary standards within the field of view, no routine nightly photometric standards are obtained with this instrument. If you require standards you must request them explicitly in your Phase 1 proposal (and include the time needed for these in your time request); you should also upload observing groups for them in your Phase 2 submission.
Sensitivity, Saturation & Defocus
The sensitivity of RISE is similar to that of IO:O (and RATCam before it) with an SDSS r'-band filter. Even so, those preparing proposals should use our Exposure Time Calculator as a guide to the signal-to-noise ratio expected with a given exposure time, seeing, sky brightness, etc.
RISE is, however, typically used with very short exposure times on bright targets, often with the telescope defocused to avoid saturation and to minimise uncertainties associated with flat-fielding. We STRONGLY RECOMMEND that users planning long groups (more than 10-20 minutes) submit a test observation to establish the best exposure time and telescope focus setting for their needs.
As a guide, on a 10th magnitude star in a 4 second exposure with 2x2 binning, the following has been measured in "typical" observing conditions:
| Telescope defocus (mm): | 0.5 | 1 | 2 |
| Peak counts (ADU): | 20,000-35,000 | 6,000-20,000 | 5,000 |
Note that saturation occurs at around 40,000 counts with 2x2 binning.
The following plots illustrate the PSF diameter and peak count rate you can expect as a function of defocus. The diameters are derived directly from the optical prescription of the telescope and instrument optics. The relative peak height is derived empirically from data similar to the table above and must only be treated as a rough guide since the result is so dependent on seeing conditions.
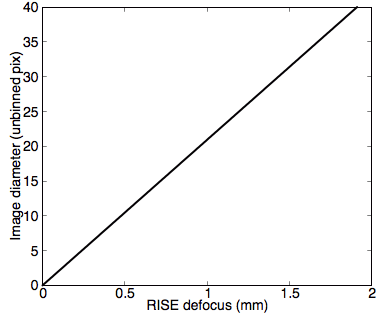
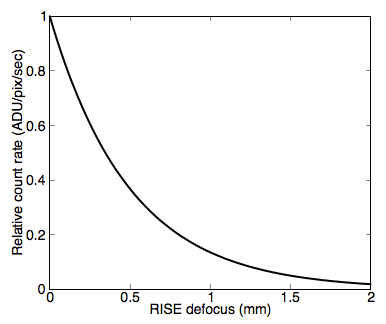
Above: General guide to effect you may expect as a function of RISE defocus.
Timing Accuracy & Precision
True integration on sky is about 18msec longer than the requested integration. The entire frame receives the same illumination, so relative photomtery between two sources in an image is unaffected by the 18msec excess integration.
The original science case for which RISE was designed demanded sub-second timing precision when determining the centroid of occultation events that lasted several hours. This is easily achieved with RISE. However the fact the camera can be read at faster than 1Hz makes it appealing for a variety of other high precision timing experiments. We here summarise the main factors that limit accuracy of the data time stamps. Please contact us if you wish to discuss the implication of these effects on your science or anything that can be done to enhance accuracy on specific observations.
- The time signal is based on NTP which is not a high precision timing protocol. The clock is however synchronised directly to a local, stratum 1, GPS receiver and over several years of operation has demonstrated <70msec accuracy. An estimate of the expected NTP error is written to each FITS header (keyword NTPERROR) and has a median value of 20msec. The value is typically a constant through the duration of a single observation sequence.
- In addition to the systematic offset from the NTP synchonisation, every individual FITS file will exhibit jitter from two separate sources in the CCD read procedure, one of 50msec and the other of 20msec. Combining these gives a timing jitter on an individual frame of 54msec. Averaged over a reasonable number of frames, this frame-to-frame jitter is expected to contribute no systematic timing error.
- The jitter is on the time stamp written, not on the true timing of the observation. I.e., it is in principle possible to resample the FITS header time stamps to evenly interpolate over an observation sequence to recover a more accurate time for any single frame. The true jitter on the observation epoch cadence has never been directly measured, but is believed to be orders of magnitude smaller than the time stamp errors quoted here.
- In summary, combining all the above, the time stamp on a single FITS file should not in isolation be considered to be better then 90msec.
Dates of Hardware Changes
For the benefit of observers performing long term monitoring we here summarize the dates of major hardware changes that could potentially leads to changes in photometric calibrations.
- 26 Jul 2017: Filter changed — RISE's single fixed filter was changed from the visible "V+R" band to the near-infra-red "I+Z" band.
- 27 Jun 2018: Tertiary feed mirror cleaned — Gave significant step-change increase in total throughput.
- 13 Jan 2020: Filter changed — The filter was changed back from "I+Z" to "V+R".
Data Pipeline
All RISE data are run through a modified version of the IO:O data pipeline on the morning after the data was taken. The pipeline debiases, removes a scaled dark frame, and flat-fields the data using a library flat which is updated every few months. The original V+R visible band filter caused no detector fringing. The near-IR filter does show weak fringing however no automated fringe subtraction is currently being applied by the pipline. An automated email is sent when reduced data are available for download.
Phase 1 information
No filter-change or readout time overheads need be applied when applying for RISE time; a simple 60 second slew overhead and the universal 20sec initialisation overhead are all that are required. No filter changes are possible, and the readout time is negligible.
Phase 2 information
Guidelines on how to prepare observations are given in the Phase 2 web pages. Note in particular the instrument-specific User Interface Instructions. The phase 2 "Wizard" should always be used to prepare observations. Groups that can not be prepared with the wizard should be discussed with LT Phase 2 support. Note that LT staff do not routinely check observing groups, and that observing groups are potentially active as soon as they are submitted. Please do contact us if you have any questions about your observations.
In general we recommend 2x2 binning is used for all RISE observing due to the better linearity and cycle time in this mode. For bright targets you must be very careful of saturation and may well need to defocus the telescope.
Users are also encouraged to use MULTRUN exposures with RISE.
